| |
||
|
|
|
|
 |
ПРОГРАММИРОВАНИЕ РОБОТА ДЛЯ ПРОХОЖДЕНИЯ ЛАБИРИНТА
Для прохождения лабиринта без датчиков нужна высокая точность в движении робота, иначе робот застрянет зацепившись за стенку. По сути его движение состоит из движения прямо на 30 см и поворота на 90 градусов (а такое мы уже делали при объезде коробки в конкурсе "Квадрат"). Но многие заметили, что управление роботом с помощью задержки не дает каждый раз одинаково результата. То есть, если аккумулятор немного разрядился, то робот проедет меньшее расстояние, нежели с полным зарядом аккумулятора.
Избавимся от этого недочета используя встроенный в двигатель счетчик оборотов - энкодер.
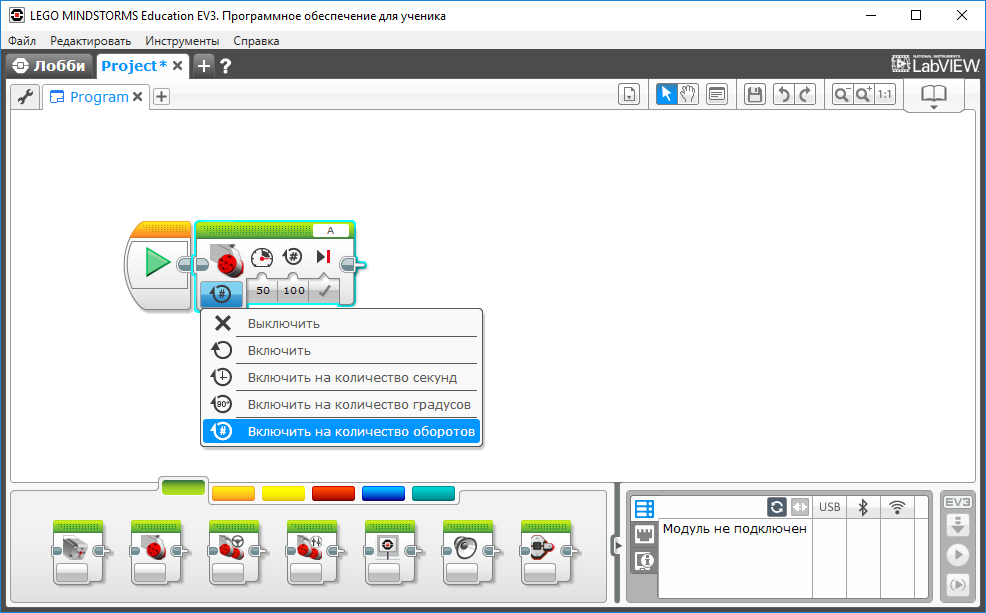
Включаем двигатель подключенный к разъему А. Ждем 100 оборотов, потом выключаем двигатель.
Если собрать пятиминутную тележку и записать в робота эту программу, то робот будет поворачиваться. Угол поворота будет зависеть от числа оборотов и размера колеса.
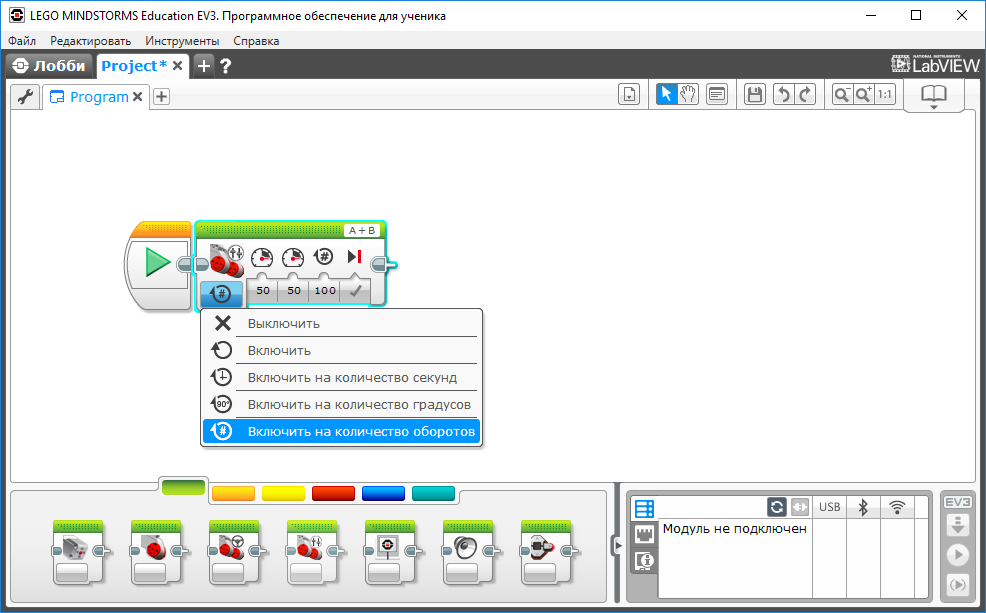
Включаем двигатели подключенные к разъему А и В. Ждем 100 оборотов двигателя подключенного на разъем А, потом выключаем двигатели.
Пятиминутная тележка с такой программой поедет прямо. Сколько проедет робот? Проведем эксперимент! Положим линейку, поставим робота на 0 см и включим программу. Теперь вы знаете сколько проедет робот за 100 оборотов. Нетрудно подсчитать какое количество оборотов нужно задать, чтобы робот проехал 30 см (одну клетку лабиринта).
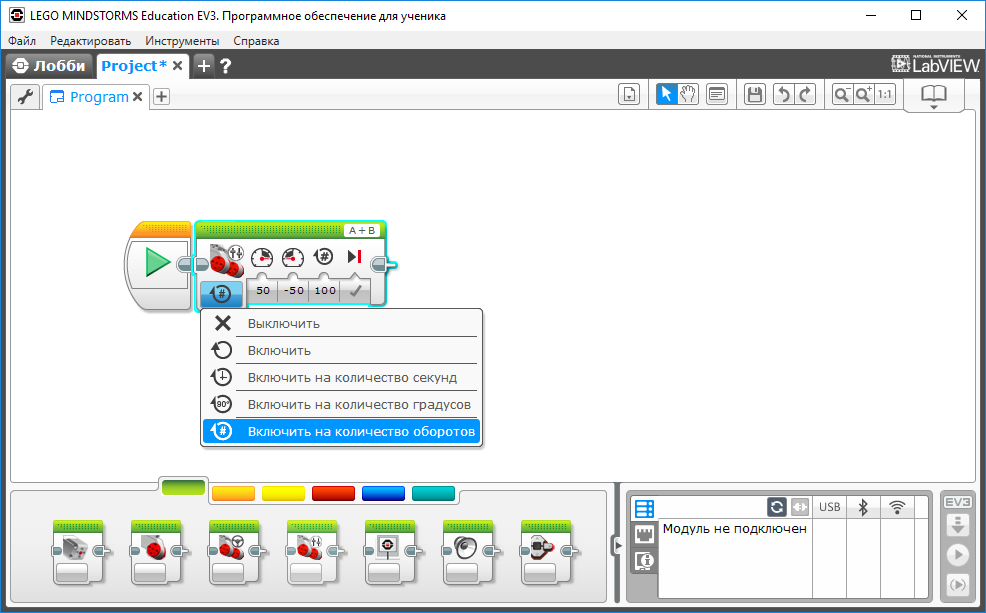
Включаем двигатели подключенные к разъему А и В но в разных направлениях!! Ждем 100 оборотов двигателя подключенного на разъем А, потом выключаем двигатели.
Пятиминутная тележка с такой программой будет вращаться на определенный угол относительно центра между колесами. Нам нужен угол 90 градусов, поэтому подберем (или подсчитаем) число оборотов двигателя подключенного к разъему А.
Вы можете послать свое сообщение по электронному адресу temp3@yandex.ru или посетить раздел Контакты.
|
|
Copyright © 2012